Image Watch是在VS2012上使用的一款OpenCV工具,能够实时显示图像和矩阵Mat的内容,跟Matlab很像,方便程序调试,相当好用。
多版本OpenCV:对于工程中有两个以上OpenCV版本的情况,加入#include 后编译又可能出现重定义的情况。开始我一直没搞清楚原因,后来在stackoverflow查了下。原因如下:
也就是说如果VS中安装了两个以上的OpenCV版本,VS可能会搞混,把include的地址解析到了两个不同OpenCV目录下的头文件,因此引起重定义。
于是在VS中把include目录下的OpenCV2.3.1的头文件地址删除,问题解决。
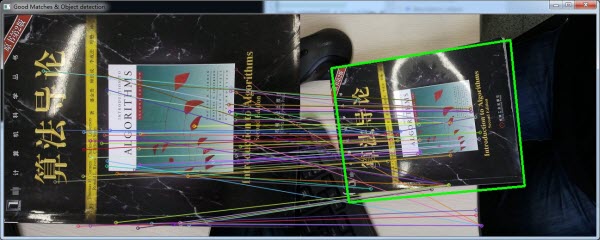
Image Watch实例:利用二维SURF特征和单映射寻找已知物体。输入两幅图像,一幅是需要寻找的物体图像,另一幅是场景中包含此物体的图像。
SURF特征的特征描述方法封装在SurfFeatureDetector类中,利用成员函数detect函数检测出SURF特征的关键点,保存在vector容器中,再利用SurfDesciptorExtractor类进行特征向量的计算,将之前的vector变量变成矩阵形式保存在Mat中。
利用FLANN特征匹配算法进行匹配,此算法封装在FlannBaseMatcher类中,匹配后保留好的特征匹配点。利用findHomography获取匹配特征点之间的变换,最后利用perspectiveTransform定位到场景图中物体的4个点。
代码如下:
#include
#include
#include
#include
#include
#include
#include
using namespace cv;
void usage()
{
std::cout << "Usage: ./FindObjectByFeature " << std::endl;
}
int main(int argc, char *argv[])
{
if(argc != 3)
{
usage();
return -1;
}
Mat img_object = imread(argv[1], CV_LOAD_IMAGE_COLOR);
Mat img_scene = imread(argv[2], CV_LOAD_IMAGE_COLOR);
if(!img_object.data || !img_scene.data)
{
std::cout << "Error reading images!" << std::endl;
return -1;
}
//step1:检测SURF特征点/////////////////////////////////////////////////////////////////
int minHeassian = 400;
SurfFeatureDetector detector(minHeassian);
std::vector keypoints_object, keypoints_scene;
detector.detect(img_object, keypoints_object);
detector.detect(img_scene, keypoints_scene);
//step2:计算特征向量///////////////////////////////////////////////////////////////////
SurfDescriptorExtractor extractor;
Mat descriptors_object, descriptors_scene;
extractor.compute(img_object, keypoints_object, descriptors_object);
extractor.compute(img_scene, keypoints_scene, descriptors_scene);
//step3:利用FLANN匹配算法匹配特征描述向量//////////////////////////////////////////////
FlannBasedMatcher matcher;
std::vector matches;
matcher.match( descriptors_object, descriptors_scene, matches);
double max_dist = 0; double min_dist = 100;
//快速计算特征点之间的最大和最小距离///////////////////////////////////////////////////
for(int i = 0; i < descriptors_object.rows; i++)
{
double dist = matches[i].distance;
if(dist < min_dist) min_dist = dist;
if(dist > max_dist) max_dist = dist;
}
printf("---Max dist: %f \n", max_dist);
printf("---Min dist: %f \n", min_dist);
//只画出好的匹配点(匹配特征点之间距离小于3*min_dist)//////////////////////////////////
std::vector good_matches;
for(int i = 0; i < descriptors_object.rows; i++)
{
if(matches[i].distance < 3*min_dist)
good_matches.push_back(matches[i]);
}
Mat img_matches;
drawMatches(img_object, keypoints_object, img_scene, keypoints_scene,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
//定位物体////////////////////////////////////////////////////////////////////////////
std::vector obj;
std::vector scene;
for(int i = 0; i < good_matches.size(); i++)
{
//从好的匹配中获取特征点/////////////////////////////////////
obj.push_back(keypoints_object[good_matches[i].queryIdx].pt);
scene.push_back(keypoints_scene[good_matches[i].trainIdx].pt);
}
//找出匹配特征点之间的变换///////////////////
Mat H = findHomography(obj, scene, CV_RANSAC);
//得到image_1的角点(需要寻找的物体)//////////
std::vector obj_corners(4);
obj_corners[0] = cvPoint(0,0);
obj_corners[1] = cvPoint(img_object.cols, 0);
obj_corners[2] = cvPoint(img_object.cols, img_object.rows);
obj_corners[3] = cvPoint(0, img_object.rows);
std::vector scene_corners(4);
//匹配四个角点/////////////////////////////////////
perspectiveTransform(obj_corners, scene_corners, H);
//画出匹配的物体///////////////////////////////////////////////////////////////////////
line(img_matches, scene_corners[0] + Point2f(img_object.cols, 0), scene_corners[1] + Point2f(img_object.cols, 0), Scalar(0,255,0), 4);
line(img_matches, scene_corners[1] + Point2f(img_object.cols, 0), scene_corners[2] + Point2f(img_object.cols, 0), Scalar(0,255,0), 4);
line(img_matches, scene_corners[2] + Point2f(img_object.cols, 0), scene_corners[3] + Point2f(img_object.cols, 0), Scalar(0,255,0), 4);
line(img_matches, scene_corners[3] + Point2f(img_object.cols, 0), scene_corners[0] + Point2f(img_object.cols, 0), Scalar(0,255,0), 4);
imshow("Good Matches & Object detection", img_matches);
waitKey(0);
return 0;
}
匹配结果图如下(下图中左边子图为待寻找的物体图像,右边子图场景中寻找到的物体图像):
在Debug模式下,如果我们在程序某处设置调试断点,当程序运行到断点处时,可以在Image Watch窗口(View->Other Windows->Image Watch)查看已经分配内存的Mat图像。